Robotic Ripples: Variable Surface Manipulation
interior living room application



Harvard University Graduate School of Design | Fall 2013
Professors: Nathan King + Rachel Vroman
Course: Material Research, Digital Design and Fabrication
Project type: Robotic Fabrication meets Ceramics
Team: Rossitza Kotelova, Peter Sprowls, Sekou Cooke, Bongjai Shin
Award: Reshape Digital Craft 2014
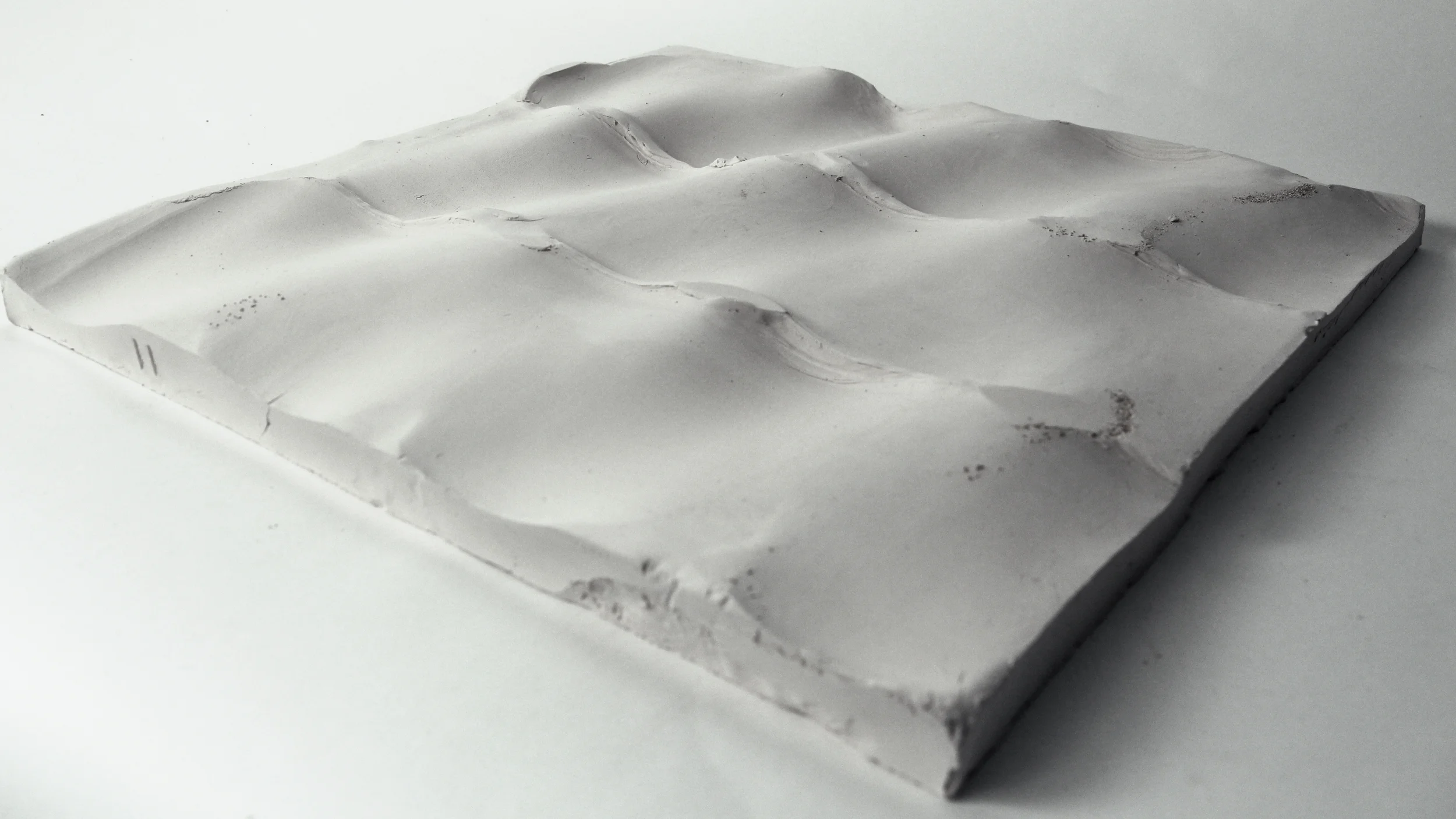
Along with an increase in demand for customization, the ceramic industry is turning to innovative fabrication strategies in order to produce highly customizable products. Methods such as linear extrusion, dry press, and wet press are currently used to achieve some degree of customization, however, these methods have limitations when applied to high-volume production processes. By combining traditional clay rolling techniques and industrial scale robotic fabrication, we can achieve highly customizable ceramic surfaces that are easily mass produced without the use of molds or dies. In order to explore what opportunities the combination of these two very different methods allows, a custom roller tool attachment for an ABB IRB 4400 robotic arm was designed and fabricated.
For proof of concept, a 6-foot by 6-foot full-scale prototype of a ceramic façade system is produced. This Robotic Roller method is directly applicable to the current tile production industry. As a process, the variable roller can be incorporated into existing tile production lines to develop infinitely customizable tile surfaces without the need to produce molds or other support materials that become waste. The Robotic Roller tool creates an entirely new set of possibilities for an existing production process that is fairly standardized.
The Robotic Roller tool resulted from combining a conventional ceramic roller with an industrial ABB robot. The tool is custom made by attaching the axle of a typical low friction large diameter conveyor roller to a frame made of steel angles and extruded aluminum. The tool has sliding arms that lock in position allowing the length and diameter of the roller to change for different designs. This adjustable feature of the roller attachment allows for an increase in surface design variation as the size, shape and pattern of the roller may be easily changed. The tool can tilt longitudinally to a maximum angle of 45˚ in either direction before causing a collision between the roller axle and the clay.

robotic surface manipulation process video
Process
robotic roller eliminates the need for a mold
roller movement max angles
robotic roller diagram
robot movement
tool path
robotic roller
robotic roller integration into existing manufacturing process
interior bathroom application
exterior facade application